


高尾英邦教授らの研究チームが電子ジャーナルNature Electronicsによるハイライト研究へ選出されました。
高尾英邦教授(機械システムコース)らの研究チームが、2019年12月7日~11日に米国サンフランシスコで開催されたIEEE IEDM2019国際会議(The 2019 IEEE International Electron Devices Meeting)において、手術鉗子先端に装着する超小型高感度の滑り触覚センサに関する最新の研究成果を発表しました。
それに先立ち、12月6日付け出版のNature Electronics誌(Nature Research刊)では、この国際会議の特集記事(会議の事前リリース情報をもとに作成されたもの)が掲載され、3件の“Research Highlights”のうちの1件として本研究発表が選ばれ、その研究内容が紹介されました。
論文題目
“Highly Sensitive Silicon Slip Sensing Imager for Forceps Grippers Used under LowFriction Condition”
(和訳:低摩擦環境下で用いられる鉗子把持部への実装にむけた高感度シリコン滑りイメージングセンサ)
論文著者
Kanako Ando,Takafumi Yamamoto,Yusaku Maeda,Kyohei Terao,Fusao Shimokawa,Masao Fujiwara,and Hidekuni Takao
今回の発表成果: 手術鉗子先端に装着する超小型高感度の滑り触覚センサに関する研究
本研究は、腹腔鏡(内視鏡)手術、ロボット手術などに用いられている超小型の鉗子先端に指先同様の触覚を与えるだけでなく、独自の原理と信号処理アルゴリズムを用いて、滑り易い臓器の把持・滑りの状態を正確に知ることができる、全く新しいセンサ技術です。鉗子先端部で臓器をつかんだ際の荷重の分布とその動きを、精密なセンサで捉えることで、滑りやすい臓器の滑り速度や把持の状態が非常に分かりやすくイメージ化されます。
この研究成果は、触覚のない内視鏡手術やロボット手術において、鉗子先端部に指先の滑り感覚を実現し、その機能を実証した世界初の成果となります。この技術は医療技術への応用のみならず、微妙な操作が求められる各種ロボットの指先に触覚を実現する様々な応用にもつながると考えられます。
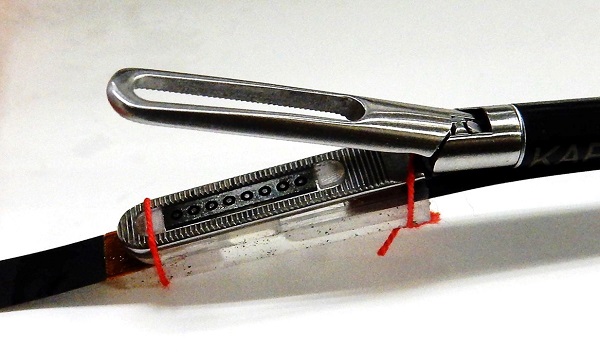
図1 腹腔鏡鉗子先端に装着した滑り触覚センサ
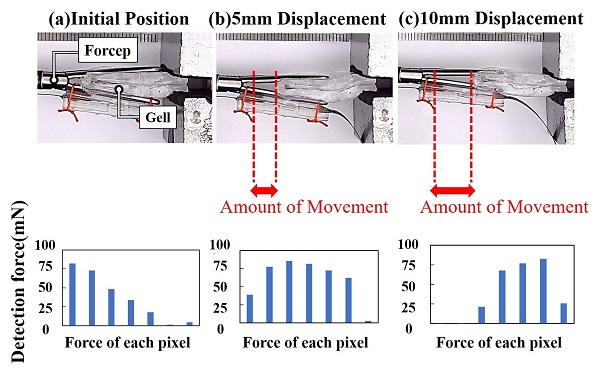
図2 臓器の滑りを模擬した際の触覚信号の変化
今回の研究発表内容は、創造工学部 高尾英邦 教授が代表として推進するJST-CRESTプロジェクト(繊細な触覚を定量的に検知する『ナノ触覚神経網』の開発と各種の手触り感計測技術への応用)の研究成果の一つであり、高松赤十字病院の藤原理朗 博士(元香川大学医学部消化器外科講師)との共同研究によるものです。IEDM2019国際会議での成果発表は、香川大学大学院工学研究科 知能機械システム工学専攻 博士前期課程1年の安東加奈子さんが筆頭著者として12月10日に登壇し、口頭発表と質疑応答を行いました。
IEEE IEDM国際会議について
電子デバイス・半導体製造分野における世界最大の規模と歴史を持つ由緒ある国際会議であり、半導体および関連デバイス技術、設計、製造、デバイス物理学、モデリング、および回路とデバイスの相互作用に関する分野の革新的成果が毎年12月に米国サンフランシスコで発表されています。
Nature Electronics誌について
Nature誌を刊行するNature Researchによって2018年1月に刊行されたElectronics分野のNature関連誌です。新奇な現象や素子の研究から、電子回路の設計、製造、広範な応用まで、エレクトロニクスのあらゆる領域の基礎研究と応用研究の成果を掲載するオンライン限定ジャーナルです。
参考情報
1.The 2019 IEEE International Electron Devices Meeting (IEEE IEDM国際会議)
https://ieee-iedm.org/ (2019.12.07~12.11)
2.Nature Electronics誌掲載情報: “Highlights from the 2019 IEEE International
Electron Devices Meeting”
https://www.nature.com/collections/iiccgcijhe (Published on Dec. 06、 2019)